
یکی از زمینه هایی که انتظار می رود در آن به طور فزاینده ای شاهد حضور پرینت سه بعدی باشیم، رباتیک نرم است. در واقع، استفاده از تولید افزودنی امکان طراحی رباتیک پیچیده و جالب را با هزینه کمتر فراهم می کند. در جدیدترین اخبار، محققان دانشگاه کالیفرنیا سن دیگو (UCSD) اعلام کردند که یک چنگک رباتیک نرم را به صورت سه بعدی پرینت کرده اند که نه تنها پس از چاپ آمادهی مصرف است بلکه برای کار به هیچ وسیله الکترونیکی نیاز ندارد. برای کسانی که ممکن است آگاه نباشند، رباتیک نرم زیرشاخه ای از رباتیک است که در آن رباتیک از مواد منعطف یا سازگار به جای متریال سفت و سخت ساخته میشود. از شروع آن در سال 2010، این رشته به طور فزاینده ای به ویژه برای برنامه های کاربردی که نیاز به بیومیمیک دارند یا در زمینه پزشکی مورد استفاده قرار گرفته است. نقطه قوت این ربات ها این است که نه تنها سبک وزن و قابل حمل هستند، بلکه نسبت به ربات های سنتی سازگارتر هستند. علاوه بر این، آنها برای مواقعی ایده آل هستند که روبات ها نیاز به تعامل ایمن با انسان ها و اشیاء ظریف دارند. به عنوان مثال، گریپرها یکی از مواردی هستند که در آن شاهد رشد شدید استفاده از این ریاتها بوده ایم. اکنون با جدیدترین پروژه میتوانیم شاهد افزایش استفاده از چاپ سه بعدی در این زمینه برای طراحیهای نوآورانهتر با این گریپر(چنگک) خاص باشیم که میتواند برای تولید صنعتی یا تولید مواد غذایی استفاده شود.
پرینت سه بعدی گریپر بدون وسایل الکترونیکی
این پروژه خاص در شماره اخیر Science Robotics منتشر شد و با همکاری BASF انجام شد. تیم روباتیک شامل Yichen Zhain، Jioayao Yan، Benjamin Shih و Michael T. Tolley از UCSD و Albert De Boer، Martin Faber، Joshua Speros و Rohini Gupta از BASF است. گریپر رباتیک نرم به گونه ای طراحی شده است که مستقیماً پس از چاپ مورد استفاده قرار بگیرد، بدون نیاز به مونتاژ، و مجهز به حسگرهای گرانشی و لمسی داخلی است که به آن امکان می دهد اشیا را بگیرد، نگه دارد و رها کند. در واقع، یک بخش کلیدی از گریپر پرینت سه بعدی این است که منطق سیال به آن به ربات اجازه می دهد تا زمانی که یک شی را گرفته است این عمل را به یاد داشته باشد. سپس، هنگامی که وزن جسم را که به طرفین فشار می آورد، تشخیص داد، آن را رها می کند.
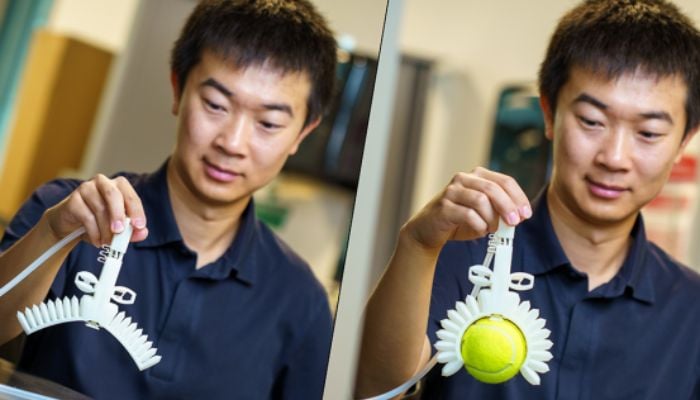
یچن ژای، محقق فوق دکتری در آزمایشگاه طراحی و رباتیک الهام گرفته از زیست در دانشگاه کالیفرنیا سن دیگو و نویسنده برجسته مقاله، توضیح داد: «ما عملکردهایی را طراحی کردیم به طوری که یک سری از دریچهها به گریپر اجازه میدهند هم به محض تماس شی را بگیرند و هم در لحظه آن را رها کند. این اولین باری است که چنین گیره ای می تواند هم چنگ بزند و هم رها کند. تنها کاری که باید انجام دهید این است که گریپر را به صورت افقی بچرخانید. این باعث تغییر در جریان هوا در دریچه ها می شود و باعث می شود دو انگشت گریپر آزاد شوند. برای ایجاد چنین شی نوآورانهای، البته یک فرآیند ابتکاری نیز لازم بود. در این مورد، چاپ سه بعدی انتخاب شد. با این حال، برای غلبه بر مشکلات قبلی با روباتهای نرم پرینت سه بعدی، به ویژه سختی و تمایل آنها به نشت، این تیم روش چاپ سه بعدی خود را ایجاد کرد. طبق یک بیانیه مطبوعاتی از UCSD، این روش شامل ردیابی نازل چاپگر یک مسیر پیوسته در کل الگوی هر لایه چاپ شده است، شبیه به کشیدن یک تصویر بدون برداشتن مداد از روی صفحه. این نه تنها امکان ایجاد گریپر پرینت سه بعدی را در یک لحظه فراهم کرد، بلکه احتمال نشت و نقص را کاهش داد و در عین حال امکان چاپ دیوارهای نازک و اشکال پیچیده و منحنی را نیز فراهم کرد. می توانید در مقاله تحقیقاتی اینجا اطلاعات بیشتری در مورد پروژه کسب کنید.
دیدگاه خود را بنویسید